



Autonomous Agricultural Rover
- Category: Robotics
- Project date: 01 January, 2022
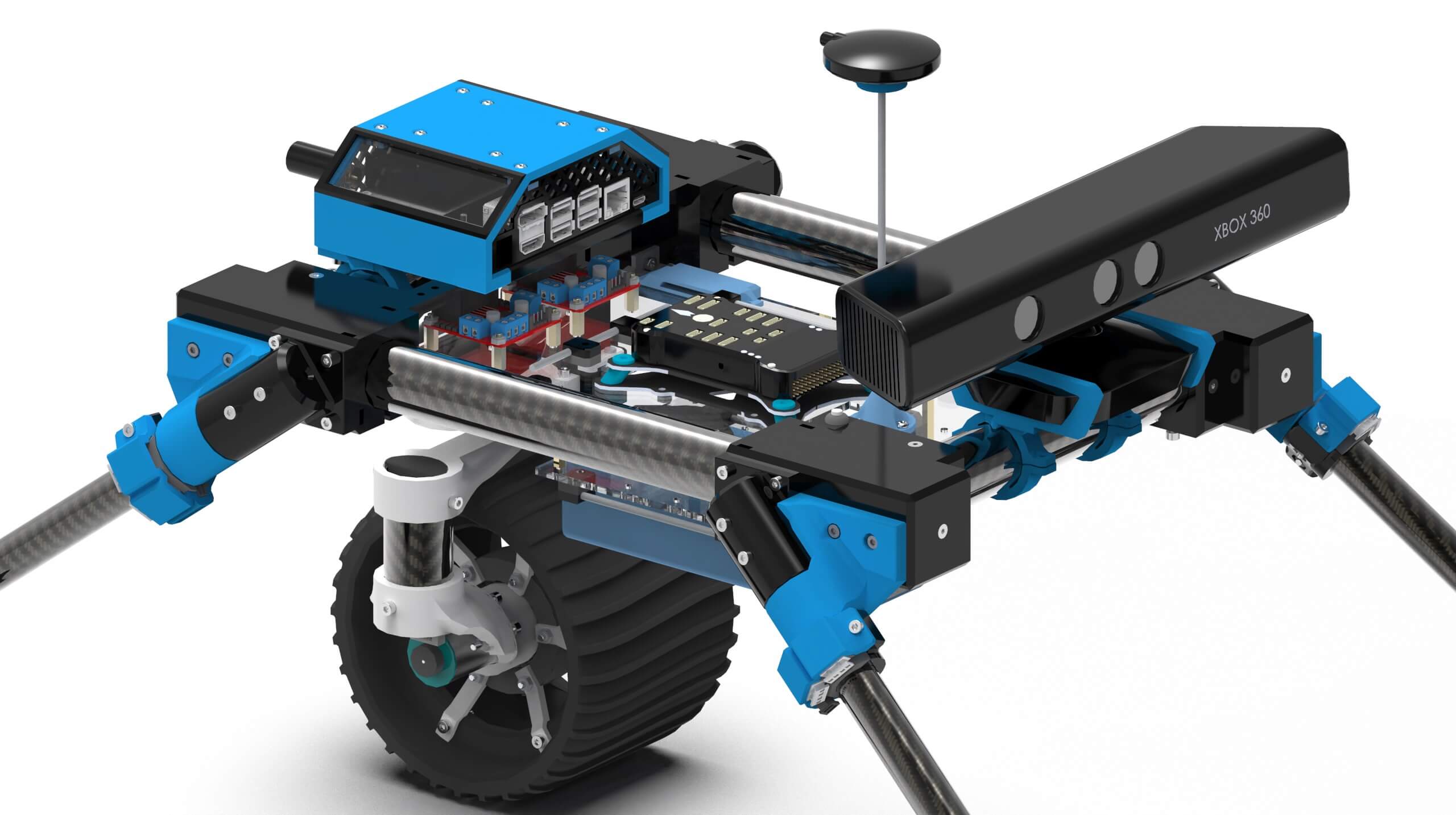
Autonomous Agricultural Rover
I have developed a cutting-edge rover prototype specifically tailored for agricultural tasks, combining both perception and autonomous navigation. Built with robust materials like carbon fiber and ABS plastic, the rover is not only lightweight but also durable, ensuring it can navigate varied terrains with ease. Powering its mobility are high-torque motors that govern both driving and its unique 4-wheel steering mechanism. At the heart of its autonomous functions is a PX4 equipped with GPS, ensuring precise navigation. Furthermore, with the integration of a Jetson Nano, the rover is capable of deploying advanced algorithms on the fly. An added Kinect sensor aids in real-time navigation and perception, allowing the rover to recognize and react to its environment efficiently. This prototype represents a significant stride in leveraging technology for agricultural efficiency and sustainability.