
Multi-Agent mobile manipulation
- Category: Robotics
- Client: King Abdullah University, KAUST
- Project date: 01 June, 2023
Multi-Agent mobile manipulation
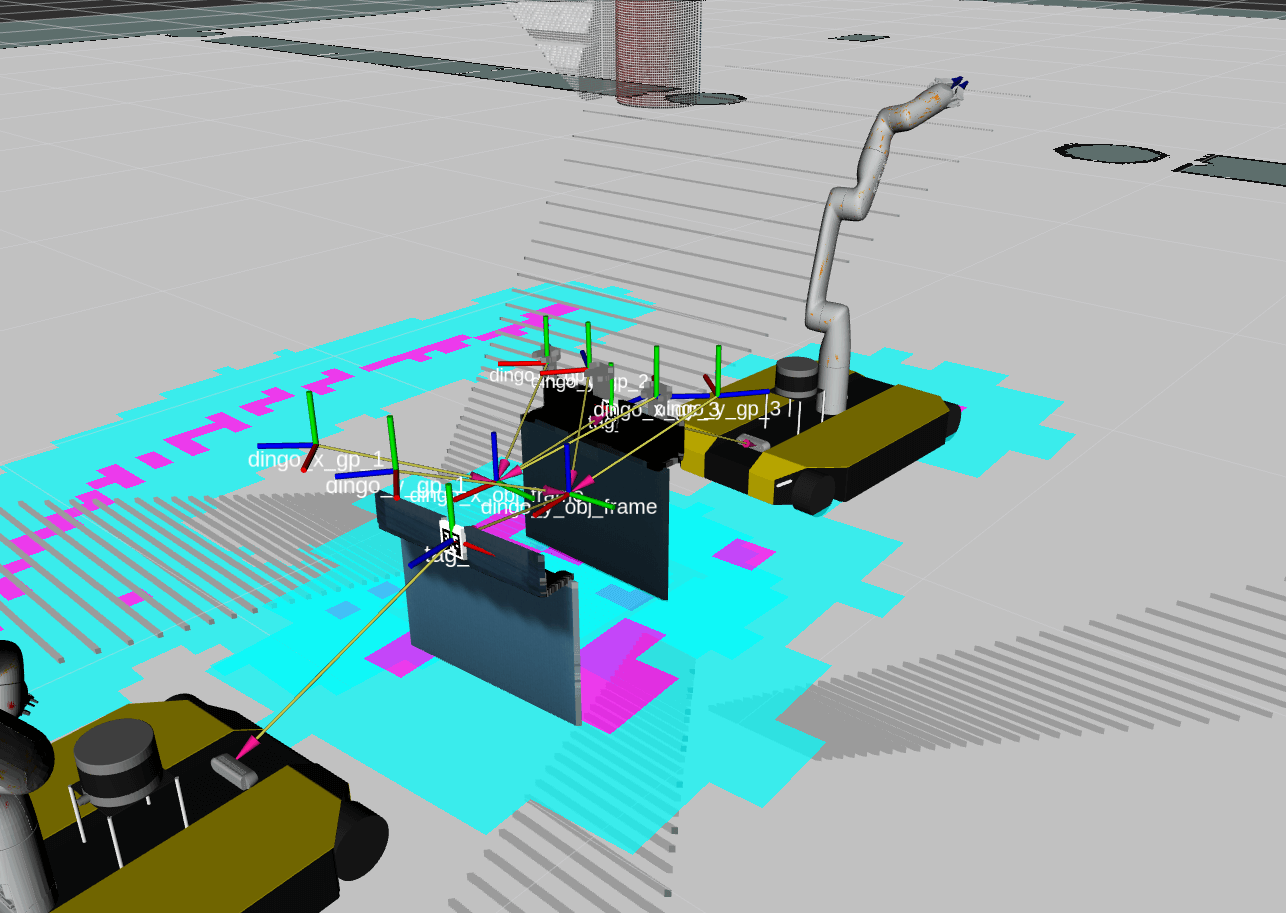
In my research at King Abdullah University of Science and Technology (KAUST), I'm working on multi-robot mobile manipulation with a focus on cooperative object transportation. Leveraging my expertise in Reinforcement Learning, the project aims to create a multi-agent system consisting of two DINGO omnidirectional robots, each equipped with a KINOVA arm. The synergy between these robotic agents is engineered to execute complex manipulation tasks, offering groundbreaking solutions in robotics and intelligent systems.