



The Fusion of Aerial Physics and Robotic Engineering in Drone Prototyping
- Category: Robotics
Drone Prototyping
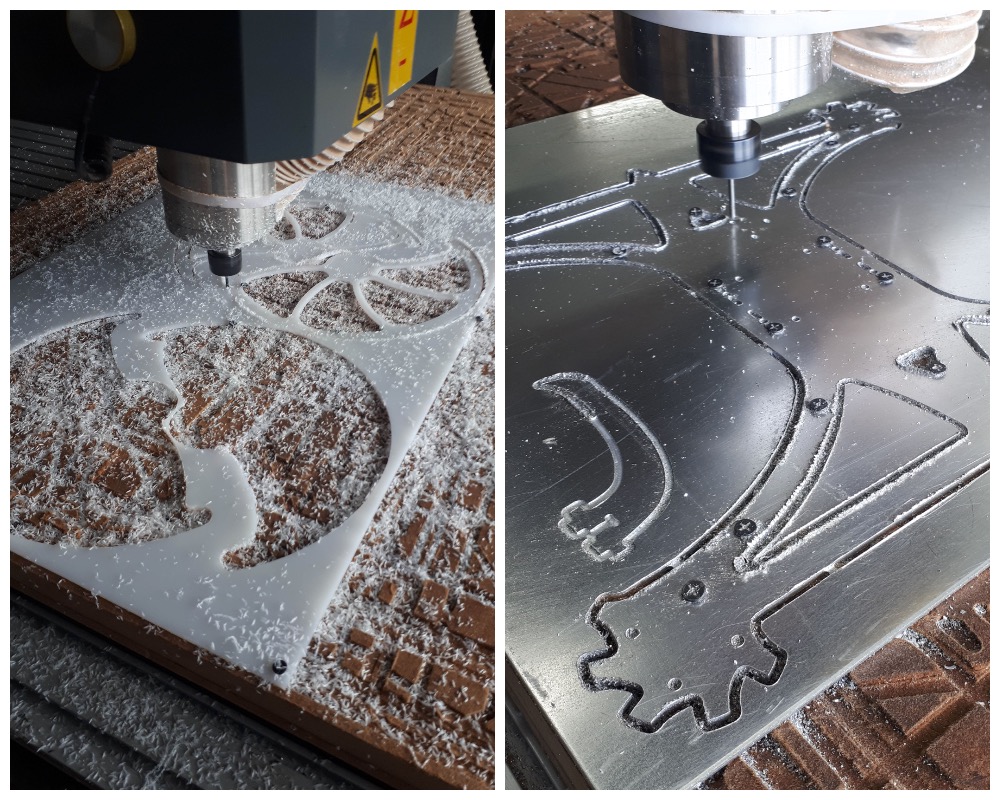
We developed a drone prototype by merging aerial physics, electronics, and mechanical design. Our research steered us to the ArduPilot flight controller due to its cost-effectiveness and compatibility with Python through MavLink. Using libraries like DroneKit and embedded systems such as Raspberry Pi and Nvidia Jetson, we achieved advanced drone functionalities. Resource constraints led us to select lightweight 5mm aluminum for the frame, constructed in FabLab via CNC milling. The drone, equipped with APM 2.8 and Neo-6M GPS, encountered issues like connection losses and orientation challenges in its initial flights. These tests, combined with participation in competitions, provided significant insights. The project also facilitated opportunities like the Drone Fundamentals Course in Mexico and research on computer vision for aerial vehicles. Future iterations promise enhanced features, integrating Pixhawk, Nvidia Jetson Nano, and advanced algorithms for autonomous flight.